Sensor Motion
Sensor-Motion é um módulo sensor de atitude que pode detectar seu próprio ângulo de atitude de três eixos, aceleração de três eixos e velocidade angular de três eixos. Usando a comunicação IIC, o endereço é 0x6A.
Especificação
 Tensão do sensor
Tensão do sensor
- Tensão de trabalho: 3,3 V
 Tamanho do sensor
Tamanho do sensor
- Tamanho da placa: 23,5 mm x 13 mm
- Interface 4Pin com espaçamento de 1,27 mm
 Descrição da função
Descrição da função
- Meio de comunicação IIC
- Taxa de transmissão: 100K - 400 KHz

Manual de programação
Você pode aprender sobre a programação do módulo de controle com o Arduino IDE em "Getting Started". A página de referência da biblioteca fornece informações detalhadas completas e exemplos sobre como usar o sensor de atitude.
Manual de sintaxe da biblioteca
Descrição numérica
Para analisar as mudanças de postura de objetos no espaço, podemos estabelecer um sistema de coordenadas espaciais retangulares comumente usado. Aqui, usamos o sistema de coordenadas retangulares espaciais para destros, mais comumente usado em matemática. A seguir, usamos o modelo da aeronave no sensor como uma referência para entender este sensor.
Sistema de Coordenadas Cartesianas Espaciais:
Coloque o sensor de atitude horizontalmente na mesa e, em seguida, desdobre a mão direita, o polegar fica perpendicular aos quatro dedos, a palma da mão está para cima e a direção do polegar é consistente com a direção da cabeça da aeronave. Consideramos o eixo onde o polegar está localizado como espaço O eixo X do sistema de coordenadas, o polegar apontando é a direção positiva do eixo X, o eixo onde os quatro dedos estão localizados é o eixo Y, o dedo apontando é a direção positiva do eixo Y, o eixo perpendicular à palma da mão é o eixo Z e para cima é a direção positiva
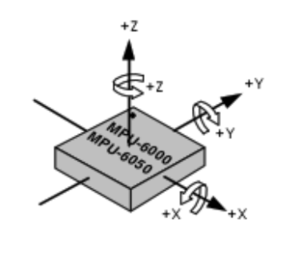
Analise o modelo do avião (a direção da mudança numérica é semelhante à regra do parafuso do lado direito):
Ângulo de três eixos (comumente usado):
- O plano continua girando para a esquerda e para a direita no mesmo plano horizontal (girando em torno do eixo Z), e o valor do ângulo de mudança é o valor do ângulo de guinada (getYaw ())
- O nariz do avião oscila para cima e para baixo (gira em torno do eixo Y), e o valor do ângulo que muda de acordo é o valor do ângulo de inclinação (getPitch ())
- O plano gira para a esquerda e para a direita (gira em torno do eixo X), e o valor do ângulo que muda de acordo é o valor do ângulo de rotação (getRoll ())
Velocidade angular de três eixos: quando não há movimento em um determinado eixo, a velocidade angular é zero.
- A velocidade angular do plano oscilando para a esquerda e para a direita é a velocidade angular do eixo Z no sistema de coordenadas do espaço (getRotationRawZ ())
- A velocidade angular da cabeça do avião oscilando para cima e para baixo é a velocidade angular do eixo Y no sistema de coordenadas do espaço (getRotationRawY ())
- A velocidade angular da rotação esquerda-direita do plano é a velocidade angular do eixo X no sistema de coordenadas do espaço (getRotationRawX ())
Aceleração de três eixos: o valor da aceleração em um determinado eixo inclui a aceleração gravitacional da Terra, e o valor que obtemos é o resultado da neutralização do componente neste eixo da aceleração gravitacional.
- A aceleração do plano oscilando de um lado para o outro é a aceleração do eixo Z no sistema de coordenadas do espaço (getAccelerationRawZ ())
- A aceleração da cabeça da aeronave oscilando para cima e para baixo é a aceleração do eixo Y no sistema de coordenadas do espaço (getAccelerationRawY ())
- A aceleração da aeronave virando à esquerda e à direita é a aceleração do eixo X no sistema de coordenadas do espaço (getAccelerationRawX ())











 Tensão do sensor
Tensão do sensor Tamanho do sensor
Tamanho do sensor Descrição da função
Descrição da função












